Dijkstra实现导航软件
数据结构 大作业二
一、实验要求
要求在所给的数据集上建立图结构(邻接矩阵或者邻接表),并在建立的图结构上自行实现Dijkstra算 法求解任 意两点之间的最短路径。
- 输入输出要求:
Input : src(源点) Dst(目标点)
Output :
(1) 最短路径的长度: distance
(2) Src到Dsr的一条最短路径,例如:Src->p1->p2->p3->…->Dst(逆序输出也对)
二、实验目的,
熟悉并掌握图的建立算法和Dijkstra求图上最短路径算法,了解Dijkstra算法的改进方法,掌握时间复杂度的分析方法并且去分析对比验证不同时间复杂度的Dijkstra算法的时间开销,了解稀疏的图结构的压缩存储方法。
三、程序能实现的功能
- 对数据文件进行二进制处理,同时少量压缩二进制文件
- 根据数据文件建立图结构(邻接表)
- 使用朴素法,二叉堆,配对堆,fibonacii堆搜索最短路径,对于大数据测试样例,搜索时间能够sub10
四、设计思路
- 预处理
- 将原数据文件转换为二进制形式
- 建立图的邻接表,将图按顺序输出,同一个出发点的边只记录以此源点,用度数来标记下一个源点
- dijkstra
- 建立
visited与distance数组 - 初始
visited数组置0,distance数组置最大(由于memset()的限制,稍小于INT_MAX) - 将源点距离设为0,访问设为1,遍历所有与源点相连的边,记录距离进入distance数组
- 从distance数组中找出distance最短的点,记为,遍历所有与相连的边,相连的点记为,如果,更新的值
- 重复上述操作,知道或者整个图已搜索完毕,仍然没有找到路径
- 逆序输出最短路径
- 建立
五、项目结构
1 | ─ navigation |
六、关键内容实现
1. dijkstra(堆优化)
1 | int *visited = new int[100000000]; |
2. 二叉堆
存储结构
1
2
3
4
5
6
7
8
9
10
11
12
13
14
15
16
17
18
19template <class T>
class Heap
{
private:
std::vector<T> data;
int length;
public:
Heap();
~Heap();
inline void swim(int k); //上浮
inline void sink(int k); //下沉
inline void push(T e); //入堆
inline void pop(); //出堆
inline T top(); //返回堆顶元素
inline bool empty(); //判断是否为空
inline int size(); //返回大小
inline void swap(T &a, T &b); //交换元素
};上浮
1
2
3
4
5while (k > 1 && data[k] > data[k / 2])
{
swap(data[k], data[k / 2]);
k /= 2;
}下沉
1
2
3
4
5
6
7
8
9
10while (k * 2 <= length)
{
int j = 2 * k;
if (j < length && (data[j] < data[j + 1])) //找到左右子树中更小的
j++;
if (data[k] > data[j])
break;
swap(data[k], data[j]);
k = j;
}
3. 配对堆
存储结构
1
2
3
4
5
6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
21
22
23
24
25
26
27
28
29
30
31
32
33
34
35
36
37
38
39
40
41template <class T>
class pair_node
{
public:
T val;
int left;
int right;
pair_node()
{
left = 0;
right = 0;
}
pair_node(T e)
{
val = e;
left = 0;
right = 0;
}
};
template <class T>
class pair_heap
{
private:
std::vector<pair_node<T>> data;
int length; //已经到达的vector地址
int _size; //实际存储的大小
inline void merge(int x, int y);
inline int merges(int x, int y);
int root;
inline int pop_();
public:
pair_heap();
~pair_heap();
inline void push(T e);
inline void pop();
inline void _pop();
inline T top();
inline bool empty();
inline int size();
};merge
1
2
3
4
5
6
7
8
9
10
11
12
13
14
15
16
17
18
19
20void merge(int x, int y)
{
if (!x || !y)
root = x + y;
else if (x == y)
root = x;
else
{
if (data[x].val < data[y].val)
{
int temp = x;
x = y;
y = temp;
}
data[y].right = data[x].left;
data[x].left = y;
data[x].right = 0;
root = x;
}
}pop即反复merge根节点的孩子节点
4. Fibonacii堆
- 存储结构
1
2
3
4
5
6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
21
22
23
24
25
26
27
28
29
30
31
32
33
34
35
36template <typename T>
struct fib_node
{
struct fib_node<T> *parent;
struct fib_node<T> *child;
struct fib_node<T> *left;
struct fib_node<T> *right;
T key;
int degree;
fib_node() : parent(nullptr), child(nullptr), left(this), right(this), degree(0) {}
};
template <class T>
class FibHeap
{
private:
int keyNum;
int maxDegree;
struct fib_node<T> *min;
struct fib_node<T> **cons;
void removeNode(struct fib_node<T> *node);
void addNode(struct fib_node<T> *node, struct fib_node<T> *root);
void consolidate();
struct fib_node<T> *extractMin();
void makeCons();
void link(struct fib_node<T> *node, struct fib_node<T> *root);
void theEnd(struct fib_node<T> *node);
public:
FibHeap();
~FibHeap();
void push(T e);
void pop();
bool empty();
int size();
T top();
}; - 具体操作见源码
七、测试程序的正确性及性能
引入pbds库中各种最小堆进行比较
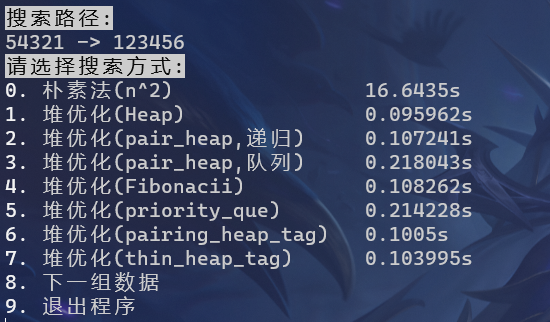
对于小数据测试样例

可以看到,对于小数据测试样例,除了朴素法时间过长以外,手写的堆以及pbds库中的堆都可以在1s之内完成搜索,由于电脑性能不稳定,时间的差距可以忽略
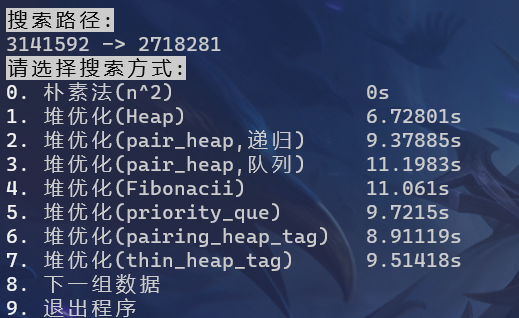
对于两组大数据测试样例
- 3141592->2718281
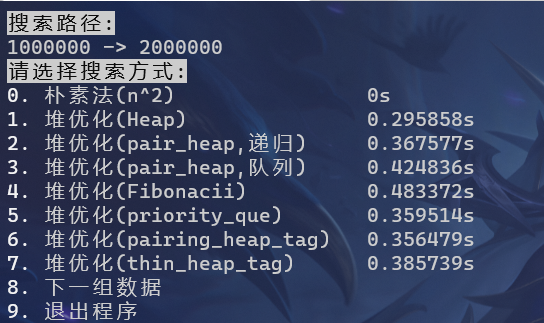
- 1000000->2000000
对于大数据测试,朴素法在一个小时内都无法搜索出答案
所有堆优化的算法都可以在25s之内完成搜索
手动实现的二叉堆拥有最好的性能,较之系统的优先队列,也有更好的表现
递归实现pop的配对堆与系统配对堆性能相仿,队列实现pop则稍有差距(如果在编译时开启O2优化,队列的性能会强于递归,但是O2优化不够稳定)
Fibonacci堆较之pbds库有着不小的差距
一些思考
配对堆和Fibonacci堆在理论上的时间复杂度都应该优于二叉堆,但是手写的二叉堆反而性能最佳,pbds库配对堆和Fibonacci堆较二叉堆也没有极其突出的表现,我认为原因可能有:
- 测试数据点特殊,具有偶然性
- 在入堆的操作上,二叉堆是的,配对堆和Fibonacci堆是的,此时二叉堆的性能较差,但由于数据特殊性,在每次入堆时,所需要经历的上浮操作较少
- 在出堆的操作上,三种堆结构均是的,但是配对堆和Fiboncci堆是均摊复杂度,单次操作极限情况下:,由于出堆几乎不是连续的,虽然上次出堆使根节点的孩子节点变成了原来的一半,由于不能立刻弹出,经历了多次入堆操作后,出堆的复杂度仍然是较高的,浪费了过多的时间
八、编译过程
编译环境
- Ubuntu-20.04 ( wsl2 )
- gcc 9.3.0
- cmake version 3.16.3
CMakeLists.txt (注意修改Debug模式和Release模式)
1
2
3
4
5
6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
21
22cmake_minimum_required(VERSION 3.5)
project(navigation)
set (CMAKE_CXX_STANDARD 17)
set(SOURCES
src/main.cpp
src/dijkstra.cpp
src/graph.cpp
src/Heap.cpp
src/pair_heap.cpp
src/fibheap.cpp)
add_executable(navigation ${SOURCES})
SET(CMAKE_BUILD_TYPE "Release")
# SET(CMAKE_BUILD_TYPE "Debug")
target_include_directories(navigation
PRIVATE
${CMAKE_CURRENT_SOURCE_DIR}/include)编译操作(Release版本为例,首先进入项目目录)
1
2
3
4
5
6
7mkdir Release
cd Release
cmake ..
make
ulimit -s unlimited # linux下打开内存限制
./navigation
# 运行程序